发布v1.1版本ubuntMate16.04的kinetic完整版树莓派3B镜像
0x00 镜像简介
距离上次发布基于ubuntuMate16.04的kinetic完整版V1.0镜像已经约有2个月,在这两个月中下载次数截止到目前为止才下载了26次,期间也有小伙伴来反应镜像中的一些小问题,我也在尝试完善,主要就是想裁剪镜像要小一点,但是经过我这次的裁剪发现大小并没有减小,反而大了一点点,可能是我删除一些不常用软件后,顺便更新了系统软件包导致系统并没有明显减小吧。

我在1.1版本中所做的更新如下:
(1)删除不常用软件包,如果删除的这些软件你还需要可以自己sudo apt-get install来重新安装:
| 1 | 删除office办公软件libreoffice,释放空间288MBsudo apt-get remove --purge libreoffice-* |
| 2 | 删除儿童游戏编程软件scratch,释放92.8MB空间sudo apt-get remove --purge nuscratch scratch squeak-plugins-scratch squeak-vm |
| 3 | 删除我的世界minecraft游戏,释放4.2MB空间sudo apt-get remove --purge minecraft-pi python-minecraftpi python3-minecraftpi |
| 4 | 删除thunderbird邮件客户端,释放58.9MB空间sudo apt-get remove --purge thunderbird thunderbird-* |
| 5 | 删除ubuntuMate的欢迎界面,释放25.3MB空间sudo apt-get remove --purge ubuntu-mate-welcome |
| 6 | 删除senseHatEmulator软件,释放810KBsudo apt-get remove --purge python-sense-emu python3-sense-emu |
| 7 | 删除光盘刻录软件brasero,释放15MB空间sudo apt-get remove --purge brasero brasero-* |
| 8 | 删除简单的扫描仪软件simple-scan,释放950KBsudo apt-get remove --purge simple-scan |
| 9 | 删除打印机相关软件, 释放22.6MBsudo apt-get remove --purge printer-driver-* system-config-printer-*
sudo apt-get remove --purge bluez-cups foomatic-db-compressed-ppds libgutenprint2 sudo apt-get remove --purge openprinting-ppds python3-cupshelpers |
| 10 | 删除聊天软件pidgin,释放33.1MBsudo apt-get remove --purge pidgin pidgin-* |
| 11 | 删除小工具plank,类似于mac上的最下面快捷启动工具,释放1.2MBsudo apt-get remove --purge plank libplank-common libplank1 |
| 12 | 删除youtube视频下载软件,释放3.8Msudo apt-get remove --purge youtube-dl youtube-dlg |
| 13 | 删除BT下载软件transmission,释放1.4MBsudo apt-get remove --purge transmission-* |
| 14 | 删除synapse软件,释放1.3MBsudo apt-get remove --purge synapse |
| 15 | 删除流程图制作软件FLUID,释放424KBsudo apt-get remove --purge fluid |
| 16 | 删除屏幕放大镜软件xzoomsudo apt-get remove --purge xzoom |
| 17 | 删除屏幕阅读软件screen reader,释放4.7MB空间sudo apt-get remove --purge gnome-orca |
(2)更新.bashrc中配置ROS环境

主要就是更新当打开终端时,根据当前wifi连接分配的IP来自动的配置ROS_IP,ROS_HOSTNAME,ROS_MASTER_URI(默认规定树莓派作为master节点,可以根据需要修改自己的master的IP地址)。这样就比v1.0版本的镜像更为人性化一点,省去我们自己来手动的修改配置文件了,这样每次连上wifi后会自动的设置。
(3)安装了可以直接在终端中分屏的软件terminator,感觉这个终端软件比默认的好用很多,可以根据需要随意的横分屏和竖分屏:

(4)还有就是在ubuntuMate的kinetic中也可以打开rviz的,注意这个不能在VNC远程界面中打开:

(5)更新swap分区大小,从2G减小到1G,这样可以更减小点磁盘消耗,理论上1G的内存加上1G的swap已经够树莓派上运行ROS大部分程序了。
0x01 镜像下载
现在已经将镜像上传至百度网盘和小课堂的ftp服务器中,由于小课堂的带宽有限,建议大家优先选择百度网盘下载,下面依次介绍两种下载方式:
(1)百度网盘下载
百度网盘下载地址:ubuntuMate_16.04_ros_kinetic_raspberryPi_v1_1.img.xz
建议大家使用百度网盘的下载软件来下载,因为使用网页下载偶尔会中断,当下载完成后第一件事就是验证镜像的完整性,是否在下载过程中损坏或者被其他人恶意修改,镜像的完整性可以通过md5值来检查,正确的md5值:d0eaaa15a55b21884b7a7ebcacf1f408,验证方法如下图所示:

(2)ROS小课堂的ftp服务器下载
由于服务器带宽有限只有2Mbps,所以我限制了ftp的连接个数,同时最多有10个人可以连接到服务器进行下载。

0x02 镜像安装
由于下载的镜像是通过xz压缩的,所以需要首先解压才能得到原始的镜像,首先检查本地电脑是否已经安装了gddrescue和xz-utils两个工具,:
安装软件包命令如下:sudo apt-get install gddrescue xz-utils
接下来开始解压镜像:unxz -dkv ubuntuMate_16.04_ros_kinetic_raspberryPi_v1_1.img.xz
解压镜像后,将准备好的microSD卡插到卡托内插到电脑上(SD卡内存大小至少要8G以上),开始将ubuntuMate_16.04_ros_kinetic_raspberryPi_v1_1.img安装至microSD卡中:

0x03 镜像使用时注意事项
(1)系统的用户名为corvin,密码也是corvin,同时root用户的密码也是corvin;
(2)系统的软件源已经更新为国内的中国科学技术大学的源,这样安装软件速度更快;
(3)系统已经默认开启ssh服务,这样一开机查到树莓派联网的ip地址后,就可以通过ssh来远程连接了;
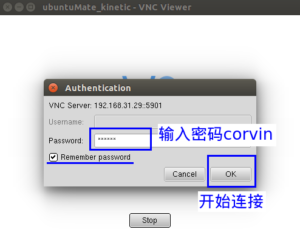
(4)系统已经默认安装了tightvncserver,开机后自动启动该服务,这样我们就可以通过VNC Viewer来远程桌面连接到树莓派上了,VNC Viewer的下载地址如下:VNC Viewer下载地址, 当下载完成VNC Viewer后,需要加上执行权限,然后直接双击就可以打开该软件,然后点击File->New connection来新建一个远程连接,配置如下就可以连接到树莓派系统了,注意在输入VNC Server时IP地址时后面要加上:1,例如我的树莓派IP地址是192.168.31.35:1这样就可以远程桌面连接到树莓派上了:



(5)当大家安装好系统后,当开机后可能会发现自己SD卡空间大小没有规定的大小,例如本来自己的SD卡有32G,但是装完系统后发现剩余空间只有44MB了,理论上应该剩余至 少21G左右空间,将自己SD卡空间找回来的步骤如下:

A:首先在终端中输入sudo raspi-config 然后会提示输入密码,输入corvin后,这样将打开树莓派的软件配置工具界面,通过上下箭头小键盘来按照如下选择;

B:选择“Advanced Options”后直接回车进入下一级菜单,选择第一项“Expand Filesystem”扩展文件系统,直接回车;

C:根据自己SD卡的大小等待时间略微不同,16G的SD卡大概等待3秒钟即可,当提示如下界面说明扩展文件系统空间成功,这时会跳转到首界面,通过点击Tab建将光标切换到finish上,回车会提示是否需要重启:


D:当重启完成后,打开终端通过执行df -h命令来查看磁盘空间已经恢复正常;

0x04 镜像问题反馈
大家在使用镜像过程中有任何问题,可以关注ROS小课堂的官方微信公众号,在公众号中给我发消息即可,我基本上每天都会处理公众号中的留言!当然,如果你要是顺便给ROS小课堂打个赏,我也会感激不尽的!